☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
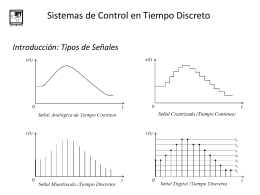
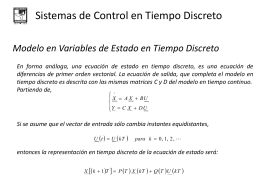
Sistemas de Control en Tiempo Discreto
El Cazo de Lorenzo
Sistemas de Control en Tiempo Discreto
Sistemas de Control en Tiempo Discreto
sistemas en tiempo discreto
Protocolo personal asistencial
Cuestiones tema 2
clase17 - departamento de procesamiento de señales
Más allá de la gestión de prensa… cambiando
139 Kb - Ministerio Pueblo Deseado
Tipos de planos
elementos finitos y b-splines en problemas elípticos semilineales
ppt
Ecuaciones en Derivadas parciales
11 October 2001
Presentación de Mapeo de Alcances para proyecto