☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1 - Matemáticas para la Vida
Equilibrio del cuerpo rígido
LAS FUERZAS - I.E.S. Guillermina Brito
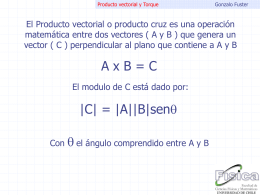
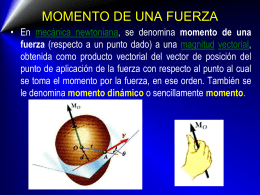
MOMENTO DE FUERZA
TEMA 2.4. TEOREMA DE VARIGNON.
CLASE Nº 1 - Iván Torres Álvarez | Plataforma
Sin título de diapositiva
Diapositiva 1 - DSpace at Universia: Home
FUERZAS
Descarga
Regla de la mano derecha
Diapositiva 1
Slide 1
TORQUE DEL MOTOR Y POTENCIA AL FRENO
CINEMATICA DE CUERPO RIGIDO
IMPULSO Y MOMENTO.
Dinámica de rotación presentación.
momento de una fuerza
Cálculo d ela orientación geográfica del Esfuerzo de cizalla resuelto
Cortes y secciones
Fuerza y Torque en la Kinesiología – Refuerzo
Diapositiva 1