☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1
MOMENTO DE FUERZA
CLASE Nº 1 - Iván Torres Álvarez | Plataforma
CINEMATICA DE CUERPO RIGIDO
Descarga
Diapositiva 1
Diapositiva 1 - DSpace at Universia: Home
Diapositiva 1 - Matemáticas para la Vida
Diapositiva 1
Cursos Disponibles Dr. Willy H. Gerber
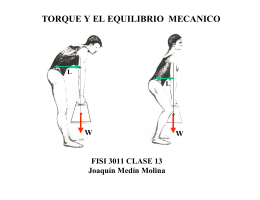
TORQUE Y EL EQUILIBRIO MECANICO
Diapositiva 1
LA TIERRA