☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
“bus” I2C
Entradas FF Sincrónicas y Asincrónicas
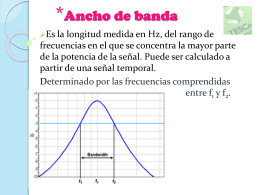
Ancho de banda - 7421MARZO
Ingresar
Bush - WordPress.com
Descargar - Creatividad Ahora
Diapositiva 1
GUÍAS DE PRÁCTICA CLÍNICA (GPC)
Diapositiva 1
Casos Posibles en la Rutas de los Buses frente a
Vista de Alto Nivel del Funcionamiento del Computador
Posicionamiento terapéutico
De la evaluacion al posicionamiento terapeutico
Diapositiva 1 - Profesor Juan Ernesto Arias Tenorio