☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Obtención de la imagen
Fascinante
estimación del tamaño de la muestra
Descarga
Descargar Presentación - Consejo Profesional de Química
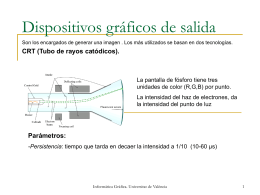
Dispositivos gráficos de salida
POBLACIÓN
Muestra y población
Métodos de muestreo
Práctico 1
Censos Poblacionales y Principales Encuesta
MUESTREO DE ACEPTACIÓN DE LOTES POR VARIABLES
Tarjetas graficas - blog de eder chavez acha