☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Grupo06trab
grupo07trab
Presentación de PowerPoint
lorem ipsum dolor sit amet. - Universidad Politécnica de Madrid
Grupo04Presentación
Equipo13_cochebrodef
Las Máquinas simples : activadoras de la fuerza.
Document
09.- LA VELOCIDAD
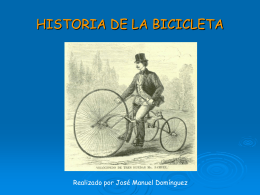
LA BICICLETA - Mi cuaderno de E.F
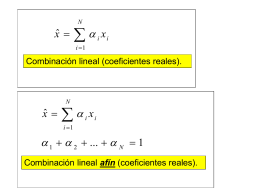
combinaciones lineales convexas
III Rueda de Negocios 2014final
Diapositiva 1 - Venta de Pastillas de Freno | KASHIMA
presentacion-diferencial
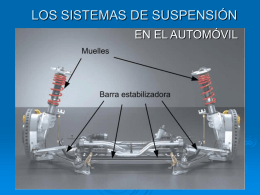
Tema 7. Sistemas de suspensión especiales.
Diapositiva 1
Sistema de valores y vectores propios de una matriz
Conductores – recomendaciones
Company vehicle safety
Formas sustitutivas de la ejecución de las penas privativas de libertad.
Curso - Tipos de cajas (formato pptx)
Manual de Convivencia
Incidente Suspensión - Bienvenido a la página de