☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
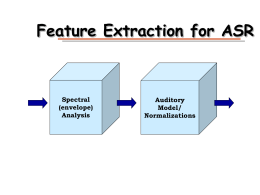
PPT - departamento de procesamiento de señales
Volcano laminated sand filters Filtros de arena
Água Potável
Las prácticas de trabajo
La Princesa Vestida con una Bolsa de Papel
Document
SanFermines2
Capítulo 1
Nate Nichols - Profesora Jordan
No Slide Title
Voting System Technologies
www.omgwiki.org
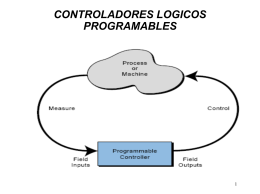
PLC BASICO 1 - Repositorio Digital EPN
Introduction - Embedded Signal Processing Laboratory