☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Autómatas de Estados Finitos no determinísticos
Automatas. Pasos para realizar un Compilador.
Lenguajes regulares
Autómatas finitos deterministas
Autómata Finito Determiníístico AFD
Diseño de Autómatas No Determinísticos
Diapositiva 1
Diseño del Autómata Finito Determinístico
Minimización Autómata de Moore
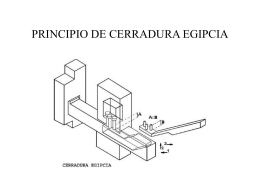
LLAVES JUDIO-ARABES SIGLO XV
Dios no está “fuera” del mundo
Lenguajes y Expresiones Regulares
`0`.
Un poco de historia
Educacion Superior - UBB - Universidad del Bío-Bío
Presentación de PowerPoint
Producto cruz Relaciones y Funciones