☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Determinantes - Correo Index
Vector de posición móvil:
Diapositiva 1 - La Verdadera Magnitud
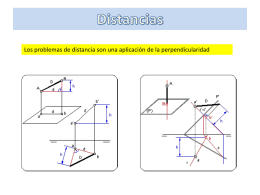
Distancias - La Verdadera Magnitud
Estudio del movimiento
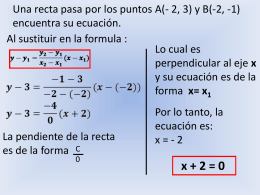
Una recta pasa por los puntos A(- 2, 3) y B(-2,
fisica clei 5_clase_5
Document
Rectas y planos en 3D