☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1
LA FISICA DEL DEPORTE - Computacion1
UNIVERSIDAD DE COLIMA
Slide 1
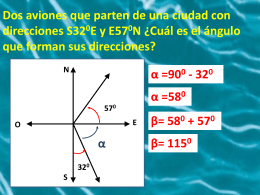
Dos aviones que parten de una ciudad con direcciones …
EL COMIC - Universidad de Castilla
EL COMIC
Aplicación de los ángulos
resolución de ejercicios
Diapositiva 1
Diapositiva 1 - Universidad de Antofagasta