☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
(Simetría interna-Grupos espaciales)
ppt nº11_5º_reflexión central
El ritmo y el color
MI BICHO
Examen físico segmentario
Diapositiva 1
Descubriendo mi otra mitad (PPT)
eX_ FISICO - WordPress.com
Planos
Los productos industriales. Jenny y Andrea
Percepción Visual y Leyes de la Gestalt
Planos en 3D
PowerPoint - Institute for Advanced Study
Geometria del Cristal
Diapositiva 1 - Colegio de Arquitectos de Salta
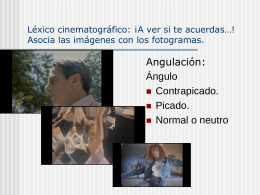
Léxico cinematográfico: ¡A ver! si te acuerdas… asocia las