☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1
CLASE 009 Momentum y ley de conservacion
PASO 2
CLASE Nº 1
INTRODUCCION A LA BIOFISICA
Diapositiva 1
Slide 1
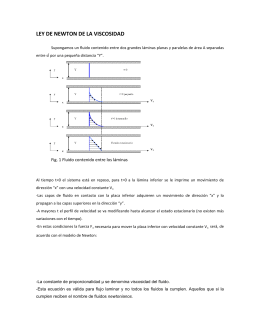
LEY DE NEWTON DE LA VISCOSIDAD
momentum angular - ensmafisica2012
Document
Clase 15: Momentum
cantidad de movimiento
THE CREATION OF APPLETS BY THE STUDENTS OF …
Resolución angular del ojo humano
EL EFECTO MOMENTUM EN EL MERCADO ESPAÑOL DE