☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
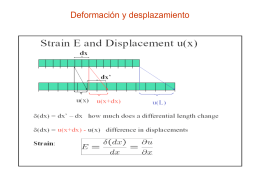
DEFORMACION EN EL ENTORNO DE UN PUNTO
azaharestodoprimaria.files.wordpress.com
Document
Diapositiva 1
Curva esfuerzo-deformaciòn DEL CONCRETO
9 - Ono
Presentación de PowerPoint
PEDAGOGIA FAMILIAR - Familia: Qué es y qué no es
Document
Hipotesis generales Resistencia
PROPIEDADES MECANICAS DE LOS MATERIALES DENTALES
Lección 5 : - Cálculo de estructuras y construcción
LA MATERIA
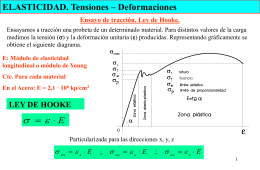
ELASTICIDAD. Tensiones