☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
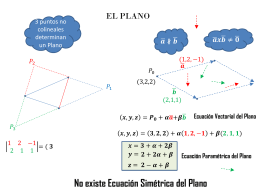
Coordenadas en el espacio
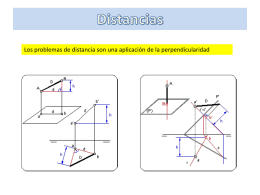
Distancias - La Verdadera Magnitud
139 Kb - Ministerio Pueblo Deseado
Descarga
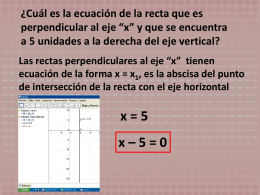
Tipos de planos
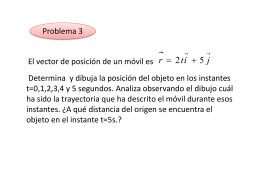
Vector de posición móvil:
Diapositiva 1 - La Verdadera Magnitud
Diapositiva 1
PROYECTO EJECUTIVO
Planos en 3D
G analitica 15 ejercicios recta