☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
TEMA_10_y_11
Cantidad de movimiento
Comunicaciones convergentes: Ingeniería de tráfico
Pensamiento estratégico VB
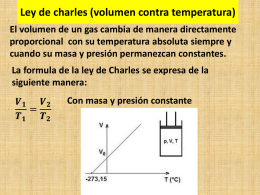
Ley de charles (volumen contra temperatura)
Cuestiones tema 2
Document
razón aritmética razón geométrica
Búsqueda Informada
Sistemas de Control
4. Leyes del Movimiento de Newton
Búsqueda en Arboles de Juego
Slide 1