☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Unidad uno parte 3
Protocolos de la capa de Enlace de Datos
técnica M - WordPress.com
Método Simplex
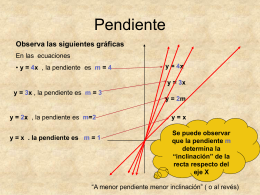
Parámetros de la ecuación de la recta en el plano (Matemáticas)
FUNCIÓN POLINOMIAL
COEFICIENTE ALFA DE CRONBACH
Redes Neuronales Artificiales
1 - marcelrzm.comxa.com
INVESTIGACION DE OPERACIONES
INVESTIGACION OPERATIVA
Capitulo 5