☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Tema VII. Modelado estructurado
Tema VIII. Guia GEMMA
Tema VI. Programacion avanzada
Las tecnologías del habla
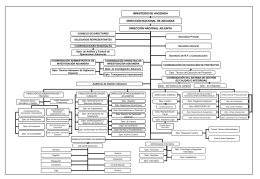
Organigrama - Dirección Nacional de Aduanas
Los Científicos y las Organizaciones Regionales Pesqueras (y otros
Oficina Nacional de Estadísticas -Organización y
Peruanos trabajando por un medio ambiente saludable
Power de Presión - Universidad de Santiago
Opciones financieras - OCW - Universidad Carlos III de Madrid
Charla sobre Educación Financiera
“Ayudemos a nuestros hijos a aprender a estudiar”.
EA FINAL - Fundacion Bios
¿Por qué pide el mercado memorias de traducción?
Ley del Silencio Administrativo LEY Nº 29060