☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Presentación 5.
Rotores de helicopteros
Flyback
File
Diapositiva 1
MÁQUINAS SINCRÓNICAS
momento de una fuerza
ELECTRICAL SYSTEM
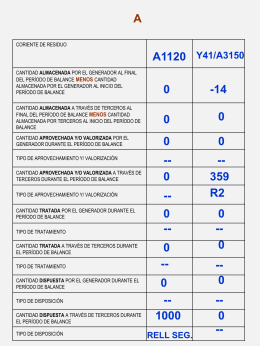
ACTIVIDAD GREMIOS 1 - Responsabilidad Integral Colombia
ppt - Revista Hispana para el Análisis de Redes Sociales
motores de ca – asïncronos - Ing. Jorge Cosco Grimaney
arrancador - Power Electronics
Tecnologías de la Nueva Era
ASO-02-06-Arranque y apagado en Linux
Tema 3 - Agrega
Variaciones de la carga
desarrollo, análisis y construcción de proyectos
Diapositiva 1
MAQUINARIA DE CORRIENTE COTINUA
Diapositiva 1
Mecánica y dinámica de aerogeneradores
Cursos disponibles