☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1
Flyback
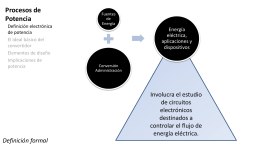
Procesos de Potencia
Taller - Blog - Universidad Tecnológica de Pereira
Modos deslizantes de orden superior
Presentación 5.
Azul oscuro
Diagnostico de Transmisiones Automaticas
Ventana Deslizante - Facultad de Ciencias Exactas
nivelacion 2
Colgajo por deslizamiento para defecto infrapalpebral