☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Computacion en Paralelo: Nuevas Formulaciones de los
Diapositiva 1
EL TEXTO PARALELO - Experiencias de formadores de …
1er y 2da entrega texto kevin
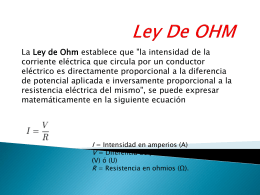
Ley De OHM
Diapositiva 1
MY VISSION
Diapositiva 1 - Universidad de Antofagasta
Diapositiva 1
Diapositiva 1 - Facebook