☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1
Diapositiva 1 - Universidad de Antofagasta
Diapositiva 1
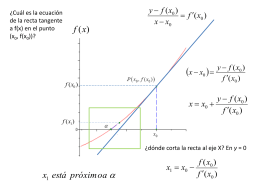
Método de la REGLA FALSA MODIFICADA.
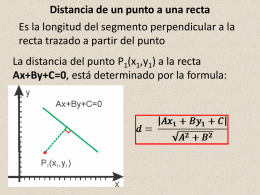
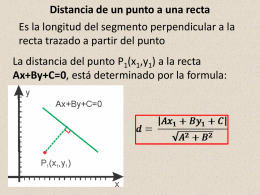
Distancia de un punto a una recta
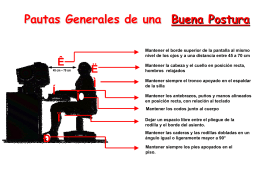
die_pun_pla - EDUCACION PLASTICA Y VISUAL
Cálculo de la pendiente de una recta
Distancia de un punto a una recta
Diapositiva 1
¿Qué argumentos justifican que los estudiantes tengan que