☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
MICROCONTROLADORES MICROCHIP
Diapositiva 1
Diapositiva 1
Excelencia es:
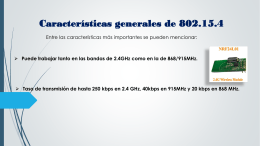
Características generales de 802.15.4 Entre las
La imagen digital 1
Transmisión Asíncrona
Diapositiva 1
FORMATO ARCHIVOS
Presentación de PowerPoint
Unidades de información