☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
ARTICULADOS- INTRODUCCION 2013
Cadenas cinematicas - Miutj's Blog de la UTJ | The
PARTES DE LA VENTANA DE ACCESS Y LA
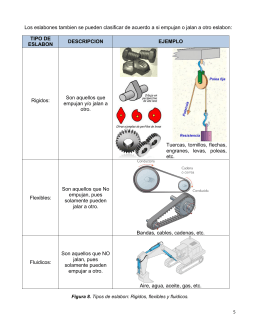
Los eslabones tambien se pueden clasificar de acuerdo a si
BANDO
Línea De Tiempo Código De Barra
Ley de Grashof - William Vargas
Producto en polvo estudiado especialmente para la
FORTALECIMIENTO DE LA CADENA PRODUCTIVA DEL …
Las Mujeres en las Cadenas de Valor
Los niños y la gracia
Gráfica de Barras