☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
Document
Document
Codes and Conventions - Media Literacy Clearinghouse
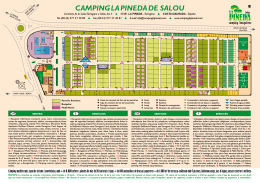
CAMPING LA PINEDA DE SALOU - La Pineda, camping bungalow
Slide 1
Super Wi-Fi Technologies
Design for Engineering
PDF IP Media Player IP815 Data Sheet
Getting It Right In Prime Time - University of Illinois at
Slide 1
HEALTH MATE - Ohio State University
Android - Tutorial . ppt - Johns Hopkins University
Using Lego Mindstorms NXT in the Classroom
No Slide Title
Chapter 3 - Language Design Principles
FPGA Two Day Workshop Instructors
Language and Brain - Shandong University
Instrumentation and Control Systems - ETP
MX: A Portable Data Acquisition and Control Toolkit
Document
Due Process – ISSAIs and INTOSAI GOVs
MAUI: Making Smartphones Last Longer With Code Offload