☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
ppt
Temple simulado
Document
Diapositiva 1
central de compras ags
Spanish 1– 8/27
Historia de los Medios y sistemas de Comunicación
Vayan y hagan
Búsqueda heurística
Funciones del Lenguaje
El Libro de Hechos El evangelio llegando “hasta lo último de la tierra”
Intensidad
Francia
LOS TEMPLARIOS
Servicios de Reloj - Departamento de Sistemas e Informática
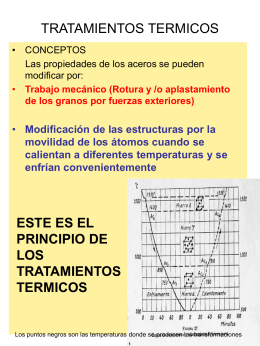
TRATAMIENTOS TERMICOS - Ciencia de los Materiales
EjemplosCiclos
Diapositiva 1
ALGORITMOS DE MONTE CARLO
TRATAMIENTOS TERMICOS - Ciencia de los Materiales