☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Problemas de frontera para ecuaciones diferenciales
Diapositiva 1
Diapositiva 1
Calidad y Mejora Permanente
Diapositiva 1
Modelos Lineales
Dibujos artísticos
Nivel 1
Fuentes Training 7 -- Marzo -2015
Document
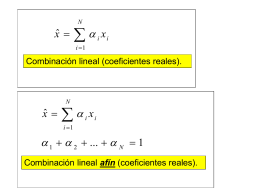
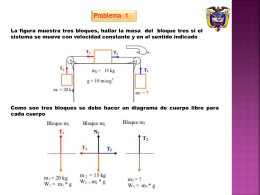
combinaciones lineales convexas
Descarga
Costo Volumen Utilidad. Punto de Equilibrio
MANDA
Sistemas continuos