☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Descarga en PDF
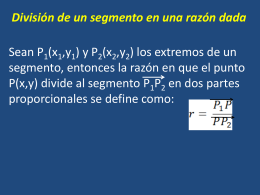
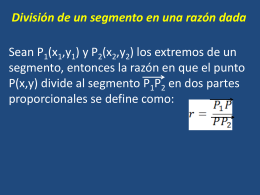
División de un segmento en una razón dada
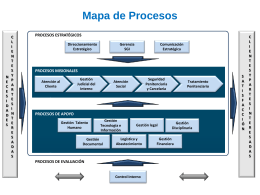
mapa de procesos inpec
esqueleto de un programa en ensamblador - Wiki
MODOS DE DIRECCIONAMIENTO - wiki
G analitica 7 div segmento en una razon
Presentación de la asignatura
MATRIZ BCG.
quien borre mato
3.4 Administración de memoria Virtual
presentación - WordPress.com
young executives training program yetp