☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Descriptores de forma
Cortes y secciones
MBE
IDEA DE NEGOCIO
MARCO PARA LA BUENA ENSEÑANZA
coscaron-oscar (autorretratodef)
Respuesta en frecuencia
Todo se ha vuelto gris
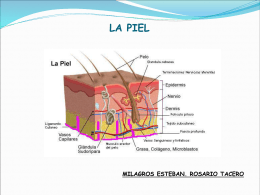
La piel - IES Villaverde
Momentos
Inteligencia Artificial
ROJO - Aula PT
Marco para la Buena Dirección
Espacios de color
Capitulo I: Teoría general de las Líneas de Transmisión.
algoritmos genéticos: detección de bordes en imágenes
plantilla power point.
Presentación de PowerPoint
análisis matemático para calcular la distancia promedio de arrastre