☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Momentos
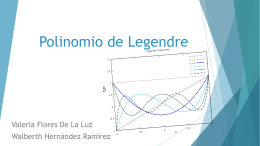
Polinomio de Legendre
Círculo de Mohr - Centro de Geociencias ::.. UNAM
PROCEDIMIENTOS
Espacios de color
Presentación Estrategia Didáctica
Localización de Planta
Capitulo 5 «Fuerzas distribuidas: centroides y centros de gravedad»
File
Concepto - Ocio y Tiempo Libre
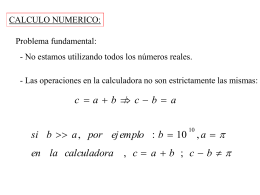
cal
Gracias por su apoyo en torno a Estándar de Protección al Trabajador
Descriptores de forma
Lugares geometricos
análisis matemático para calcular la distancia promedio de arrastre
La Visión de DuPont