☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Modelos ARMA
FENOMENOS FISICOS Y QUIMICOS EN EL DISPARO DE ARMA
ppt
Aguas de Barcelona
LA POSICIÓN.
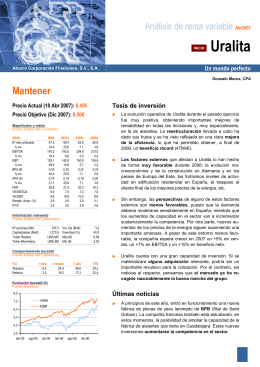
Uralita - Ahorro
Causalidad de Epidemiología
El Articulo Definido
ARMAS DEL FUTURO
Los Cuerpos Sutiles - sociedad teosófica en uruguay
García, G. JJ, Causalidad, (presentación en PPT)
Presentación en PowerPoint
BALISTICCA1 - Justicia Forense
Contrato tipo de Gestión Discrecional e
Estableciendo relaciones causales
manualzdx8111
ARMAS DE FUEGO – SUS PARTES
ESGRIMA - rubenbernal
ley marco de armas de fuego, municiones y materiales controlados
Presentación Educativa sobre Acoso Sexual