☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Actividad de apertura
Tipos de sensores - msmartinez
Programando con BricxCC
Alcalá de Henares (Madrid)
Presentación del curso
Document
Diapositiva 1
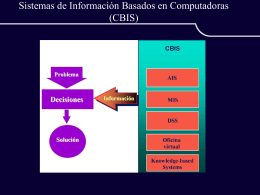
AIS
Alarma ultra sónica (A.R.D)
Quinta Clase
Soluciones de Programación: Sensores Espera-por
Soluciones de Programación: Enunciados Condicionales
Sensor de pH - .: Alacima :. Alianza para el Aprendizaje
ZELIO
Sensor proximidad - marcelahdz | Just another WordPress
La Cámara Fotográfica
La Cámara Fotográfica
ROBOT
¿Qué es un Sensor de Línea?
Sensores - MAyL. HéctorTorres Blog | Catedrático
Sensor de movimiento
Mobile Robots - Carnegie Mellon University
Elementos de la Toma Fotográfica