☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Strong Planning with Ordered Binary Decision Diagram …
Document
Artificial - Home | College of Engineering and Computer
Chapter 12: Artificial Intelligence and Modeling the Human
No Slide Title
Chapter 9
Intelligence and Psychological Testing
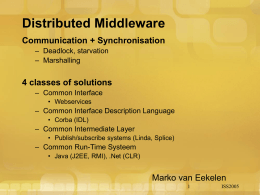
Distributed Middleware - Institute for Computing and
Slide 0