☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1
Diapositiva 1
Buscadores
Presentación de PowerPoint
Perfil del tutor
azaharestodoprimaria.files.wordpress.com
EL MANEJO DE LOS CONFLICTOS EN LA COMUNIDAD
Document
Diapositiva 1 - habilidadesparalavidajeely
BENEMERITA UNIVERSIDAD AUTONOMA DE PUEBLA FAC. DE
Redes, conocimientos y tomas de decisiones
En la siguiente diapositiva escriba en la posición
Diapositiva 1
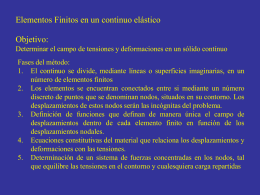
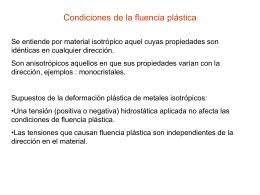
Tensiones Deformaciones
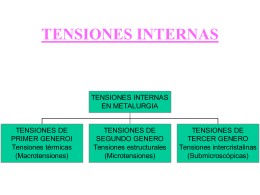
TENSIONES INTERNAS - Buenos Aires Ciudad
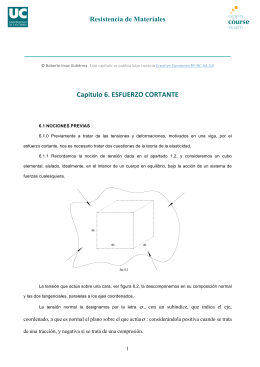
Capítulo 6. ESFUERZO CORTANTE
ESTABILIDAD DE SISTEMAS DE POTENCIA