☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
REDES ATM
Los turquesas Discutiendo Soluciones>
Presentación de PowerPoint
Presentación de PowerPoint
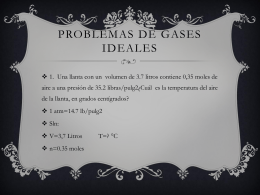
Leyes de los gases
Modelos atómicos y Gases.
Gases
Slide 1
Presión
MODO DE TRANSMISION ASINCRONO (ATM)
Document