☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Document
Institución Gabriel García Márquez
Control de motor de pasos mediante software
Diapositiva 1
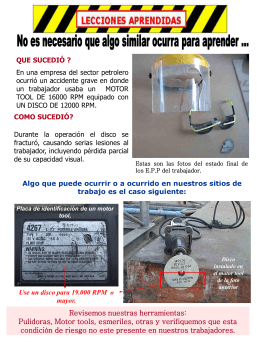
ALERTA DE HSE - Escuela Nacional de Rescate
Historia sobre el ordenador
No Slide Title
Partes de la computadora abby
COMPONENTES INTERNOS DEL COMPUTADOR
Memoria virtual
Disco Duro