☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
6. Sistemas Autoorganizados
Los tres primeros años y los circuitos sinápticos
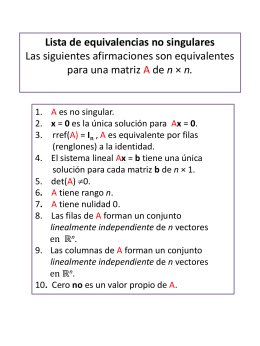
Lista de equivalencias no singulares Las siguientes
Dirección de Epidemiología y Demografía
Document
Actividades
CREES QUE LO HAS VISTO TODO
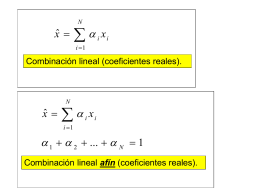
combinaciones lineales convexas