☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
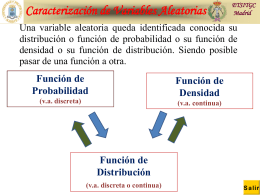
Funciones de Variables Aleatorias
continuacion uni 3 Generación de variables aleatorias industrial
Diapositiva 1
La Familia: Cuna de la Vida y espacio primordial de Humanización
Slide 1
Variables Aleatorias (ILI-280)
PPT - Grupo de Diálogo, Minería y Desarrollo Sostenible
la vivienda generadora de crecimiento económico y bienestar social
Educacion para Jovenes y Adultos
2 PY_20090203 FIB Aulas de empresa
Introduction to Time Series Analysis
Tema_3-1
ITERACIÓN SIMPLE DE PUNTO FIJO
Nivel 1
Elementos básicos de probabilidad y estadística
Poisson - Universidad de Puerto Rico Humacao
Hábitos de lectura y compra de libros (Año 2004)