☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
CONTROL REMOTO DE UN ROBOT IMPRIMIBLE DE …
ROBOT
MINIROBOTICA
Retrato
ROBOTS - kumbaya.name
Ponencia
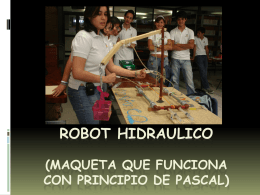
ROBOT HIDRAULICO (MAQUETA QUE FUNCIONA CON
Robot Ecológico
Actividad de apertura
crea tu propio robot
A tutorial on Visual Servo Control
Trucar un servo Futaba S3000