☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Distributed Systems Major Design Issues
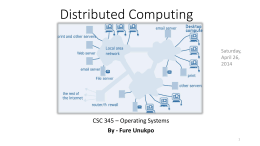
Term Project - Distributed computing
Distance Education based on personal servers Norio Ota
Faz.net technical challenges - uni
Client Server Architecture pdf Report Free
Chapter 1 Solutions
No Slide Title
Document
resources.directi.com
Document
Distributed Systems Design Issues
Distributed Process Network Deadlock Detection & …
Service Oriented Architecture
Windows Azure Platform Overview
Slides for week 7
Basic Operating System Concepts
Web Application Architecture
Business Data Communications
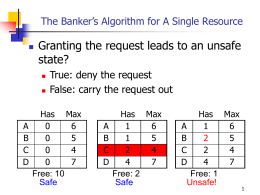
Chapter 3 Deadlocks
Software Architecture
Public Management: Concepts and Big Questions
Classification of Digital Computers & Applications of
IS605/606: Information Systems Instructor: Dr. Boris Jukic