☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1
Slide 1
Diapositiva 1
Diapositiva 1
Manos sucias!!! - ParqueSoft
Tecnología de la Información y la Comunicación - JAVIER-HR
Control por computador - Departamento de Ingeniería de Sistemas y
PARTES INTERNAS DEL COMPUTADOR
Diapositiva 1 - lennyalejandrataimbud
INFORMATICA Y SOCIEDAD
Descarga
Diapositiva 1 - JAVIER-HR
¿Conectado o desconectado?
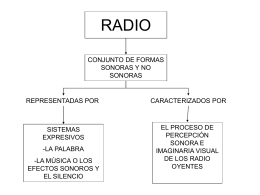
PROYECTO PROGRAMAS INICIALES EMISORA
Descarga
The television was invented by John Logie Baird, in 1926
Diapositiva 1
Diapositiva 1 - ARIADNE Finder
Control por computador
Diapositiva 1