☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Tetra Pak Template 2001
Slide 1
Why “Smart Products?”
Document
Powerpoint presentation
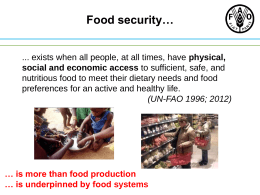
Cambio climático en agricultura: ¿Qué impactos esperamos y cómo
Visual Basic .Net - Nassau Community College
Visual Basic .NET
Document
Document
Presentación Corporativa
Overview of Software Engineering
Slide 1
SMART meeting - Seattle Robotics