☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
TRASLADO-Personal-de-Servicio-Psicologo
Condición de la Infraestructura Urbana en Santo Domingo ¿Un
aburrido/a - Spanishsebestik
Resolución de problemas
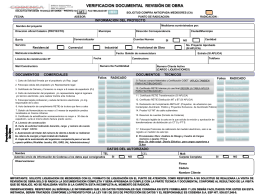
Check List Cundinamarca (abrir PPT adjunto)
Vectores
Descarga
Diaposiva "Método Científico"
Presentación de PowerPoint
Introducción a la Programación
Unidad-3-2(threads en Linux)