☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Robot Kinematics: Position Analysis
MEAM 620 Progress Report
MEAM 620: HW 2
Slide 1
IEEE ICRA`07 Digest Template
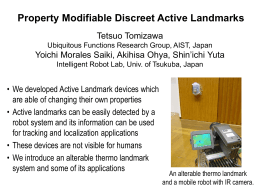
Intuitive Programming System for Material Handling Tasks
Robotics
Extended Potential Field Method
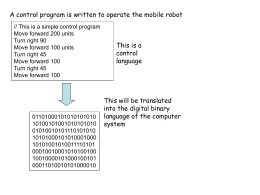
intuitive programming
PPT - Ankit Jain