☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Extended Potential Field Method
Slide 1
IEEE ICRA`07 Digest Template
Intuitive Programming System for Material Handling Tasks
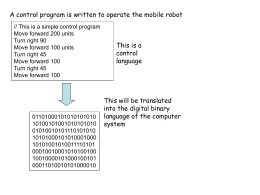
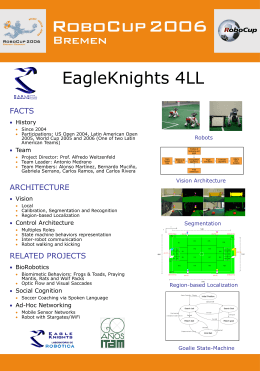
Robotics
Template
www.robomind.net
Shadmehr, Prof Reza
MEAM 620 Progress Report
CS 415 – A.I.
FRC LabVIEW Software Overview
Proposal of a REST-Based Architecture Server to Control a Robot
Integrating Intelligent Agent and Wireless
Topological Modeling with Fuzzy Petri Nets for Autonomous Mobile
Robot Kinematics: Position Analysis