☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Introducción al Método de los Elementos Finitos
Dios no está “fuera” del mundo
Qué esperar de una presentación oral
LA FUGA DE CEREBROS
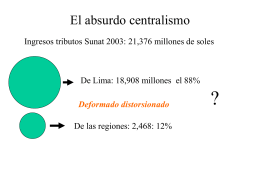
El absurdo centralismo - Ekamolle, "Instituto para el Desarrollo
Niños con necesidades especiales
La Redacción de Artículos
chile1_es
SanSebastianCambios
PROTECCIÓN DE DATOS PERSONALES Y LAS IMPLICACIONES
TIPOS DE SOCIEDADES COMERCIALES