☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Administración de Periféricos
Presentación de PowerPoint
Componentes de una computadora
Periférico de Entrada de Datos
Vista de Alto Nivel del Funcionamiento del Computador
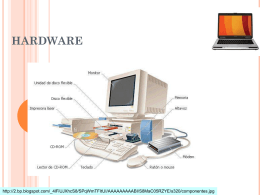
Hardware ppt - WordPress.com
gestion y liderazgo
tema 3 - sistemas de información, organización y procesos de negocio
ALERTA DE HSE - Escuela Nacional de Rescate