☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1
Diapositiva 1
ROBOT
Diapositiva 1
Nuestro robot
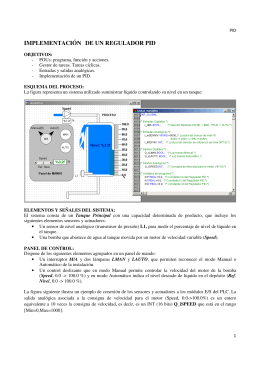
P7-Regulador PID
Retrato Robot
Retrato
Ponencia
ROBOT HIDRAULICO (MAQUETA QUE FUNCIONA CON
Regulación PID
Implementación de un Regulador PID Regulador PID
Fork() - XP
1. Regulador PID
Diapositiva 1 - Universidad Nacional de Colombia
ppt
señal de error
TRABAJO FIN GRADO Adaptación Grado Electrónica
Raza-Mexicana Ezine 19
Instrumentos de Planeación y Evaluación
Dirección de arte, comunicación y estrategia
Teoría de Sistemas Operativos
Regulación PID