☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1
PLAN
Presentación de PowerPoint
p-obs-arq
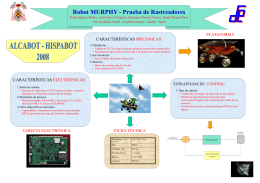
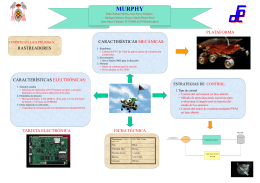
Presentación de PowerPoint
Dpto. de Tecnología. IES “8 de Marzo”
Salud por los malos amores
Diapositiva 1
MINIROBOTICA
Ponencia
SISTEMAS EMBEBIDOS Y PROGRAMACIÓN EN TIEMPO REAL
SPELLMAN “CONSTRUYENDO UN ESPACIO LIBRE DE …
Agentes inteligentes - Facultad de Ciencias de la Computación
Presentación - Solicitud Automatizada del Espacio Web:: Ucol..
Sensores Ópticos
Cap 2
RCX de LEGO
SENSORES DE MOVIMIENTO - sensores-movimiento
Curso de Sensores Industriales Básico
Diapositiva 1
12. Presentación Webots
Sensor de aparcamiento con display 6 sensores
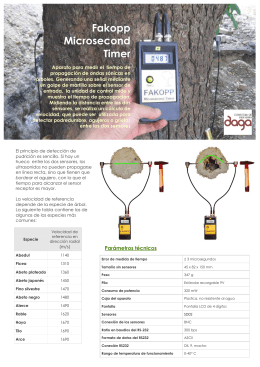
Microsecond Timer