☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Reasoning from Radically Incomplete Information: The …
Egg Drop Lab Report
LONG HAUL JOURNEY ASSISTED BY REDWEB TRACKER
A High-Level Toolkit for Development of
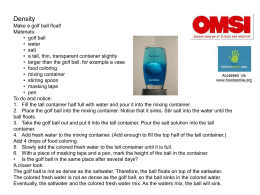
Density: Make a Golf Ball Float
FOLLETO info RSU inglés. julio 2013
Slide 1
An Opportunity for Cloud Service Providers to Build Custom Services
CHM 130 Lab 1: Lab Safety (revised)
Mucho gusto
Kindergarten Math Shape and Space Section
Microsoft's New Windows Containers
Runtime Techniques for Efficient and Reliable Program
Control of Magnetic Levitation System
Slide 1
Analyst Conference
Document
Providing Safe Food
Slide 1
Document
Application Architecture with Open Source Frameworks
Rules and Rewriting: CLIPS
Domain Knowledge and Function Composition