☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
205 : Computer Organization and Architecture
CS136, Advanced Architecture
Slide 1
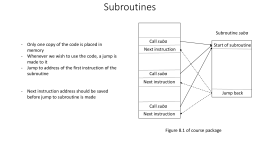
Subroutines and Control Abstraction
Pentium and PowerPC Data Types
Utilizing the GDB debugger to analyze programs
Document
ECE 425 - California State University, Northridge
CECS470 - Muhammad Shaaban's Homepage
Addressing Modes - Florida International University
Instruction Sets - George Mason University
Computer Organization and ASSEMBLY LANGUAGE
Slide 1
Programming Paradigms
Subroutines (Part 1) (in )
Chapter 2 Data Communication Concepts
ECE-548 Sequential Machine Theory
Introduction to computers
TDD to KIAPS Framework
Slide 1
Document
CSC 552.201 - Advanced Unix Programming, Fall, 2008
Slide 1